After my good friend, Radu Mantu, saw Dexter v1, a robot I had developed by using the production tools from Modulab’s workspace, he came to me with the idea of developing a far better one, called intuitively Dexter v2 (Figure 1). This new project was equipped with an RPLIDAR 360 degrees, four 60RPM motors driving a pair of omni-wheels, and a 2800mAh Ni-Mh rechargeable battery. We also found the perfect reason to get involved in this project, our participation in a student competition organized by NXP, called Linux Embedded Challenge. As I and Radu had previously done it, I took care of the electronics and he programmed the C++ code on a UDOO Neo single-board computer.

Hardware Design
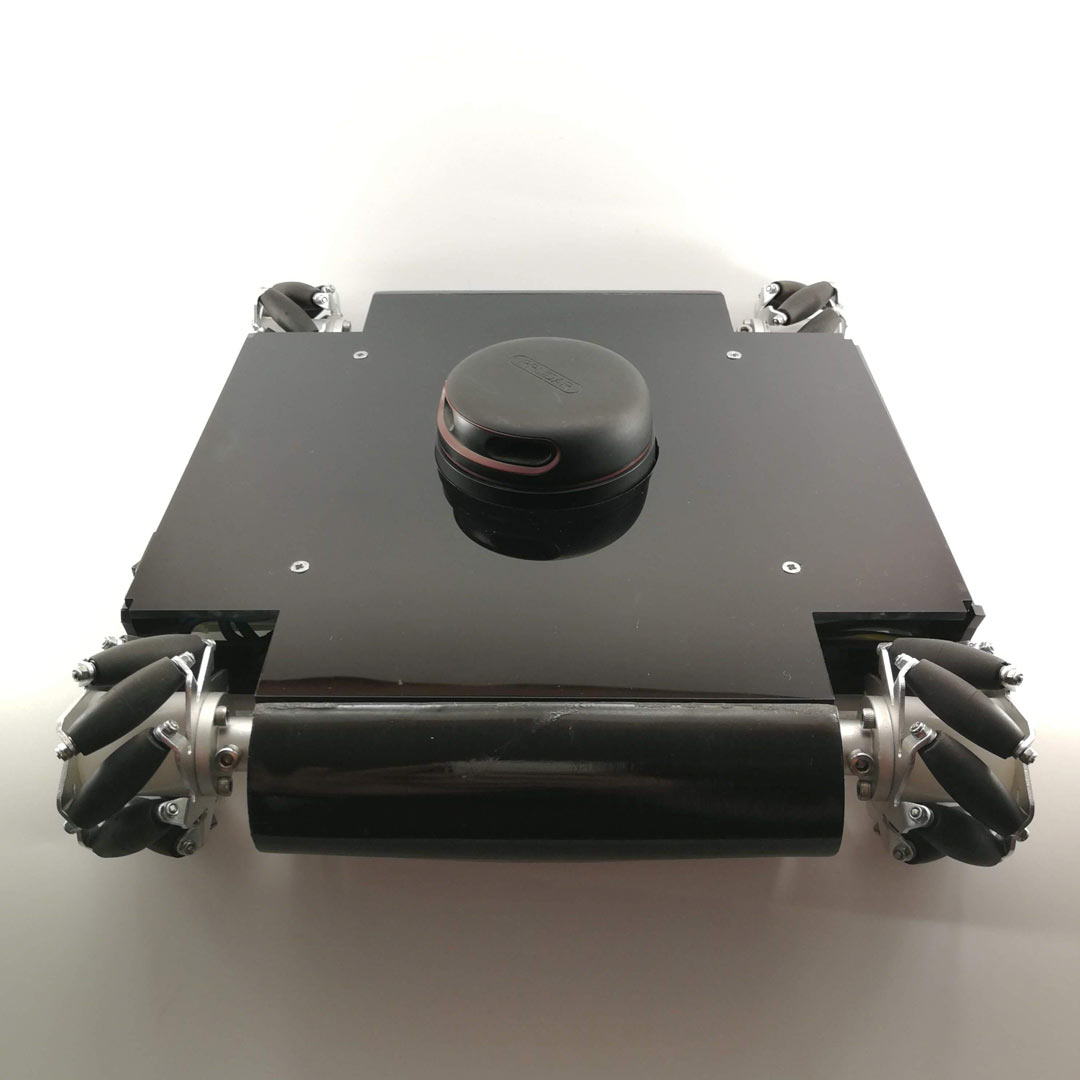
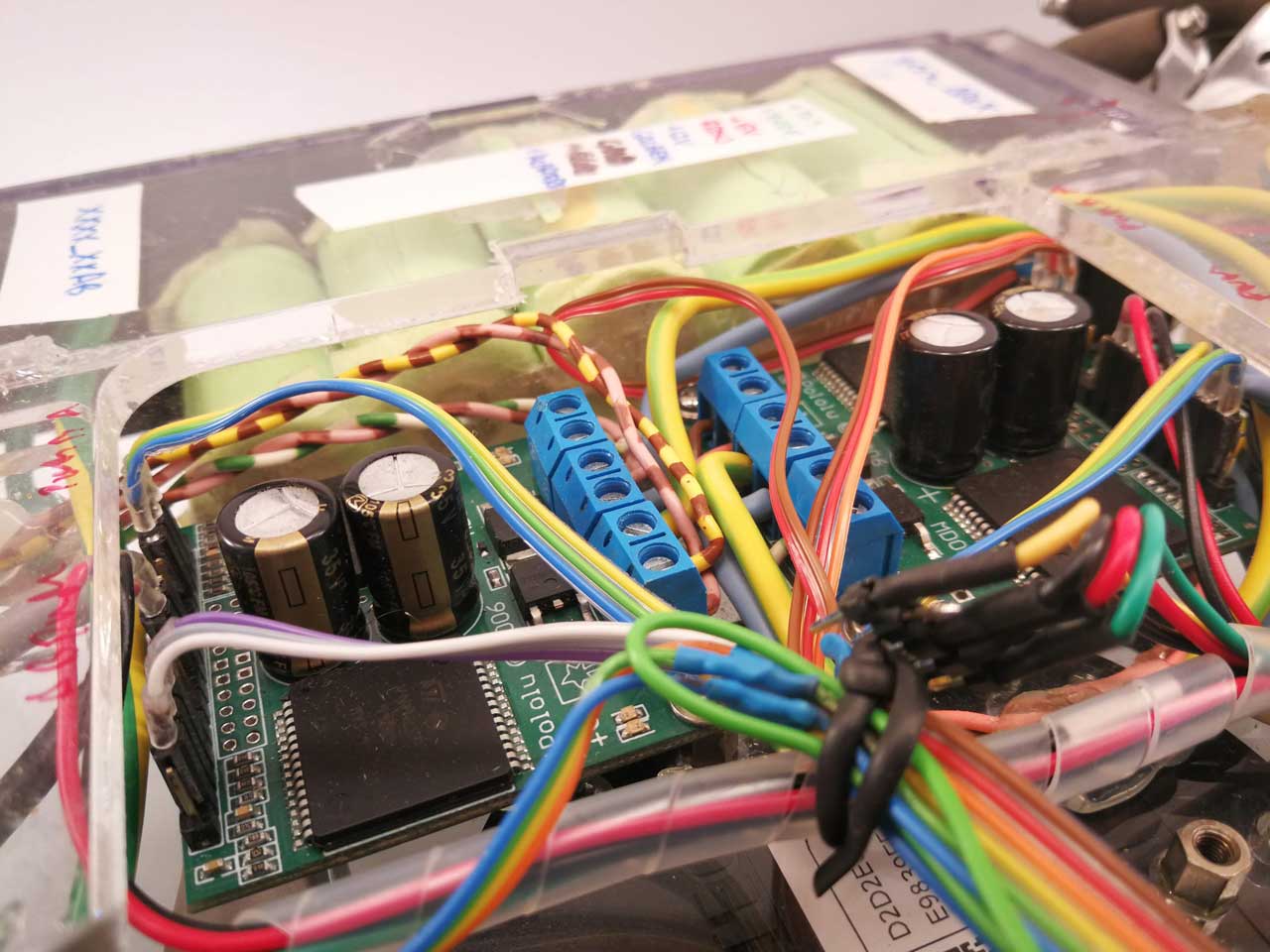
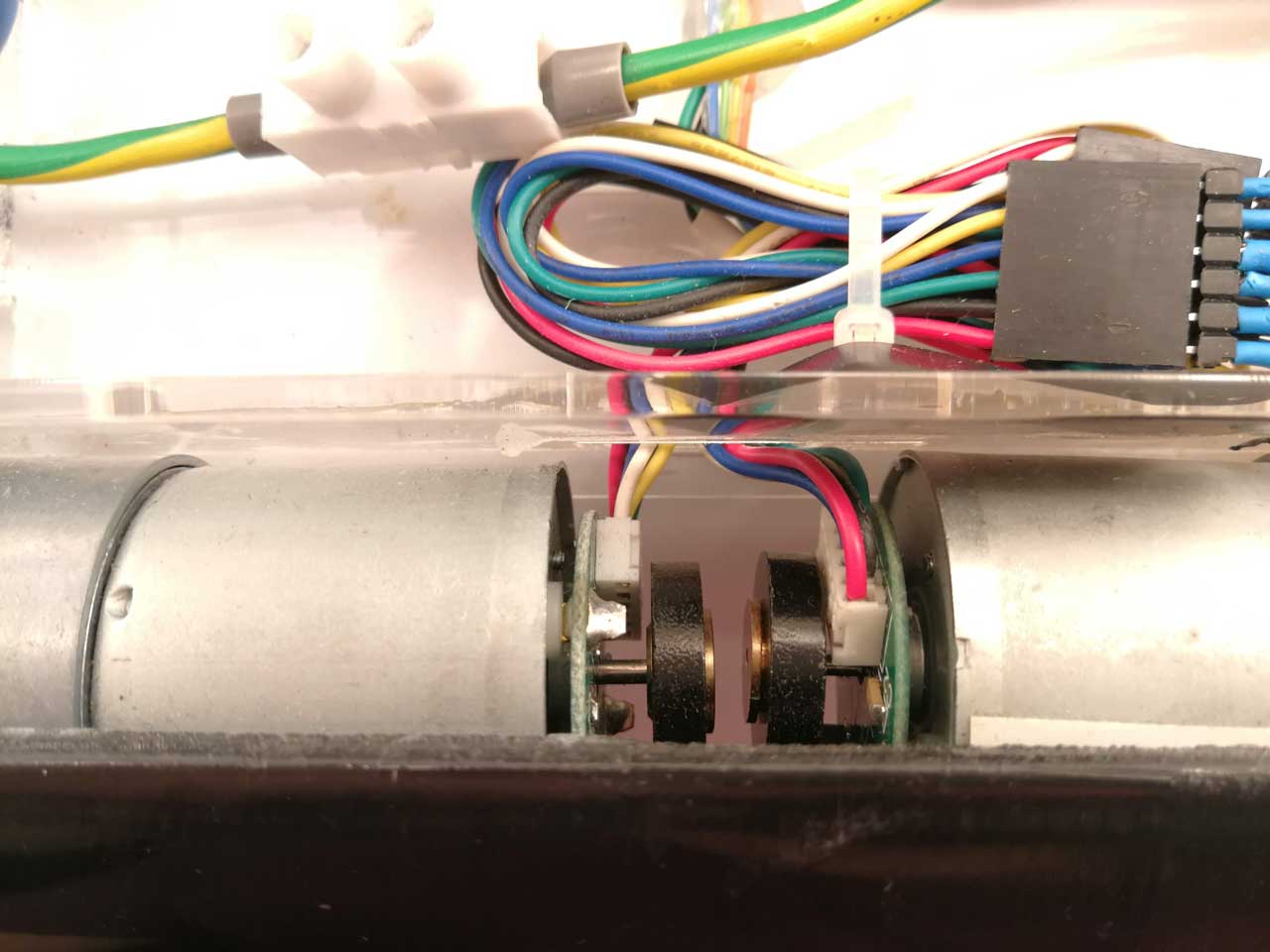
I should mention here that we had in mind to develop a SLAM (Simultaneous Localization And Mapping) robot and in order to achieve this, mandatory were an RPLIDAR 360 sensor and motor encoders on every wheel (Figures 2 to 4). I placed the RPLIDAR at the top of the robot and the two dual-channel motor drivers along with the UDOO Neo single-board computer below to save up space.




Product Design
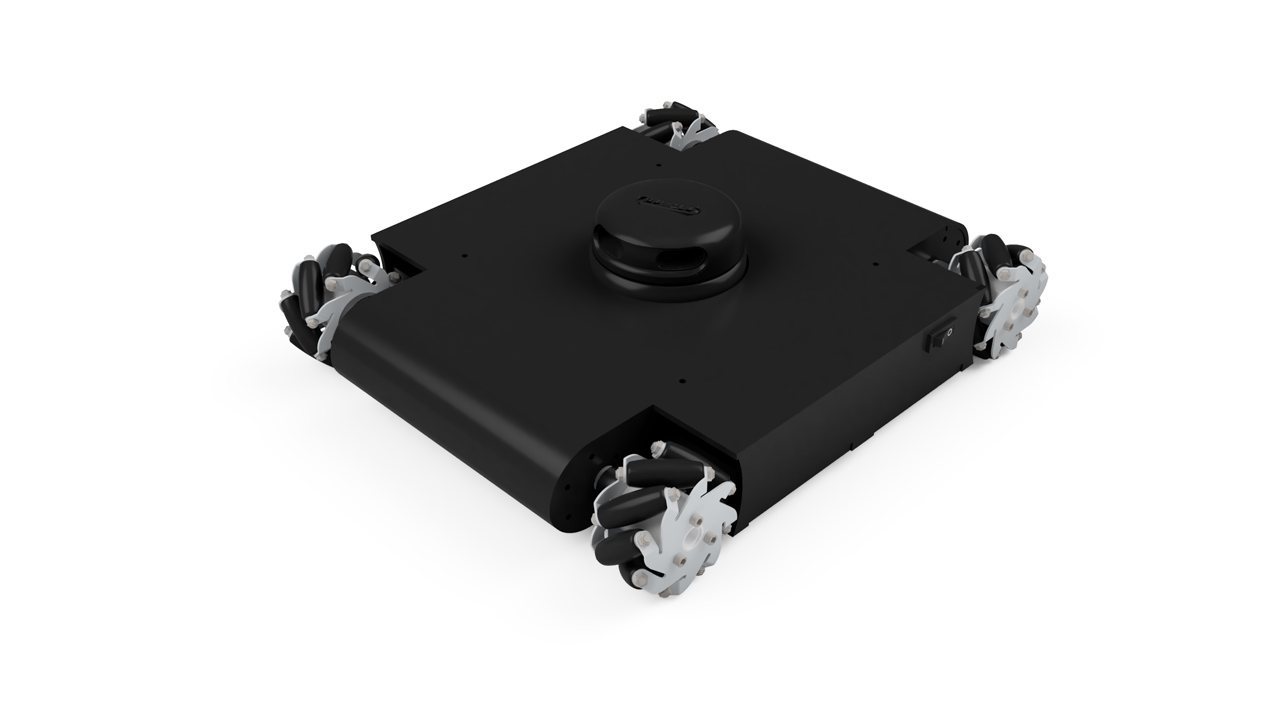
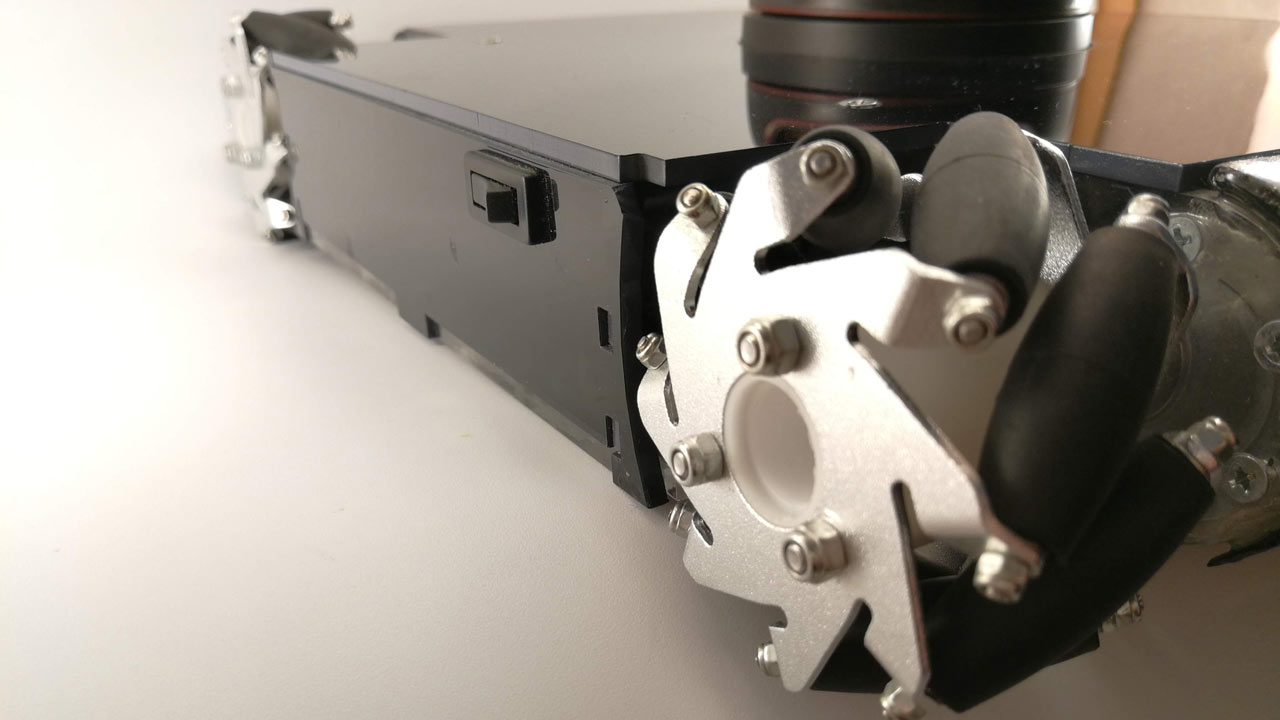
Using Autodesk Fusion 360 I developed a multi-part enclosure for Dexter v2 produced both by laser cutting and 3D printing. The full design is available here to view in the web browser of download. Besides the rear and front bumpers which were 3D printed, all the parts were laser cut and later assembled using perspex glue. As observed in Figures 6 and 7 I also opted for the black color to match the RPLIDAR and wheels.


Final Product
The final robot Dexter v2 displayed in Figure 8 was an almost-SLAM robot, operating using a bare-bone C++ code written by my good friend Radu. The robot could move inside a room and map its surroundings as long as the objects were standing still. From my perspective, this was an interesting prototyping project which helped me improve my skills in 3D product design using Autodesk Fusion 360.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}