At the beginning of 2016, I started to work as a Junior Hardware Engineer at Modulab, a creative technology laboratory. Working in their workshop gave me access to all kinds of different tools, materials, and methods such as 3D printing or laser cutting which I could also use to develop my own projects. One of the first projects of this kind was Dexter v1, a small semi-autonomous robot developed around an Arduino Leonardo. This project was just a starting point for its second version, Dexter v2, an omni-wheels robot later developed in collaboration with a good friend of mine, Radu Mantu.
Product Design
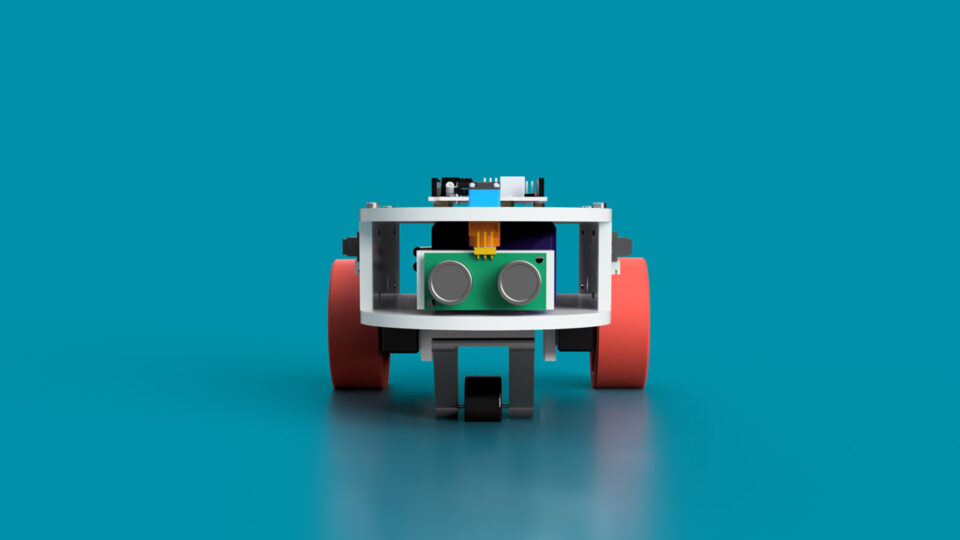
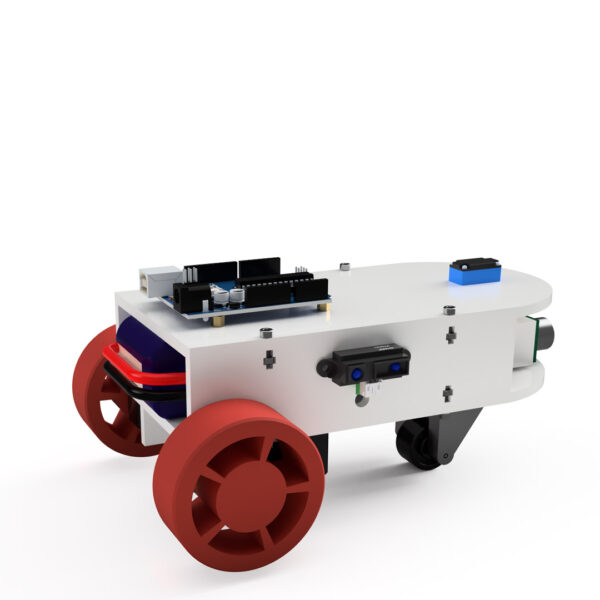
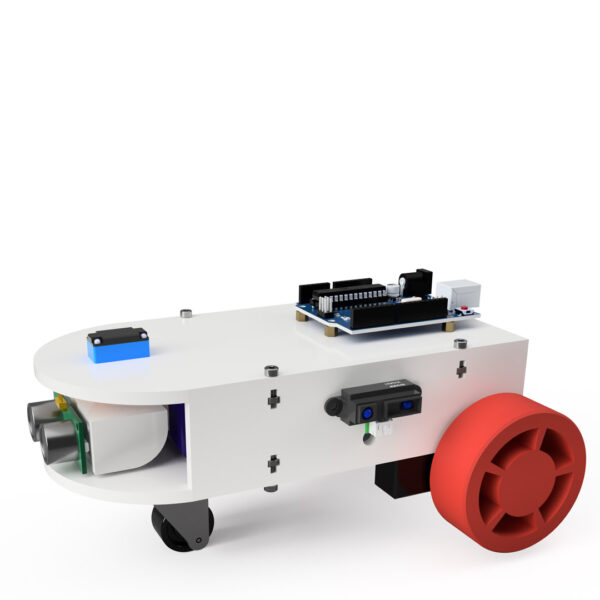
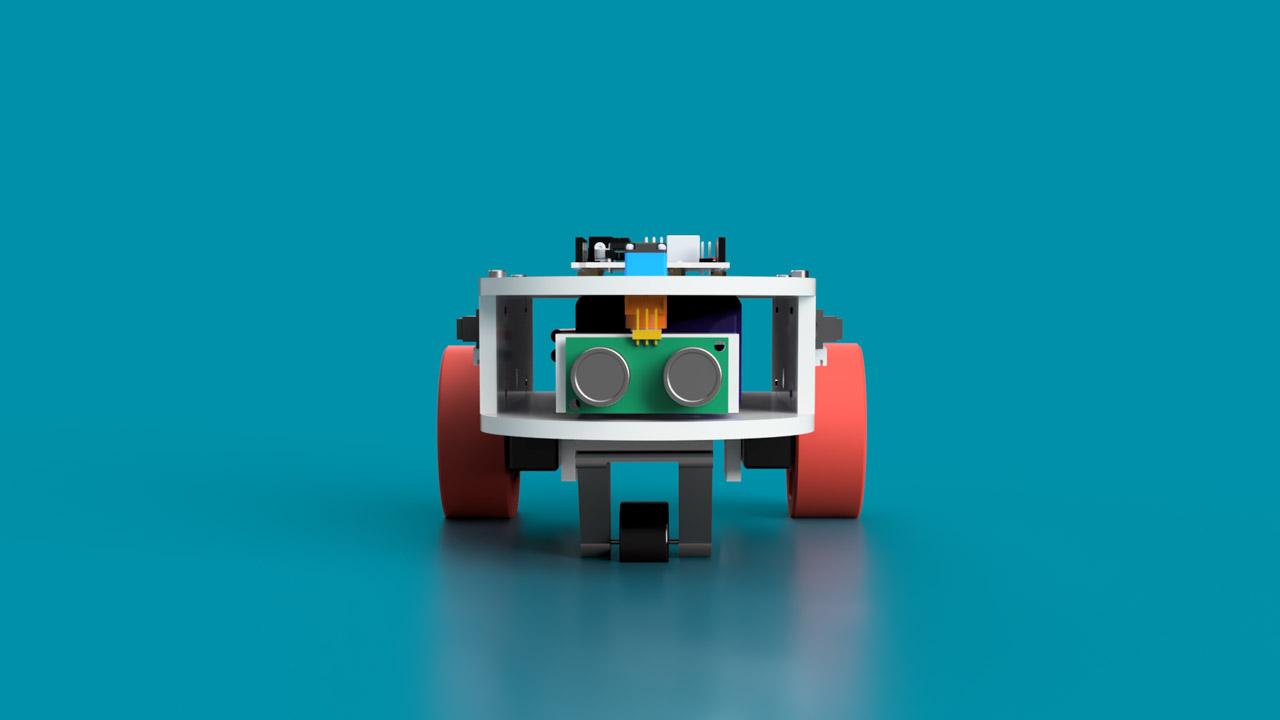
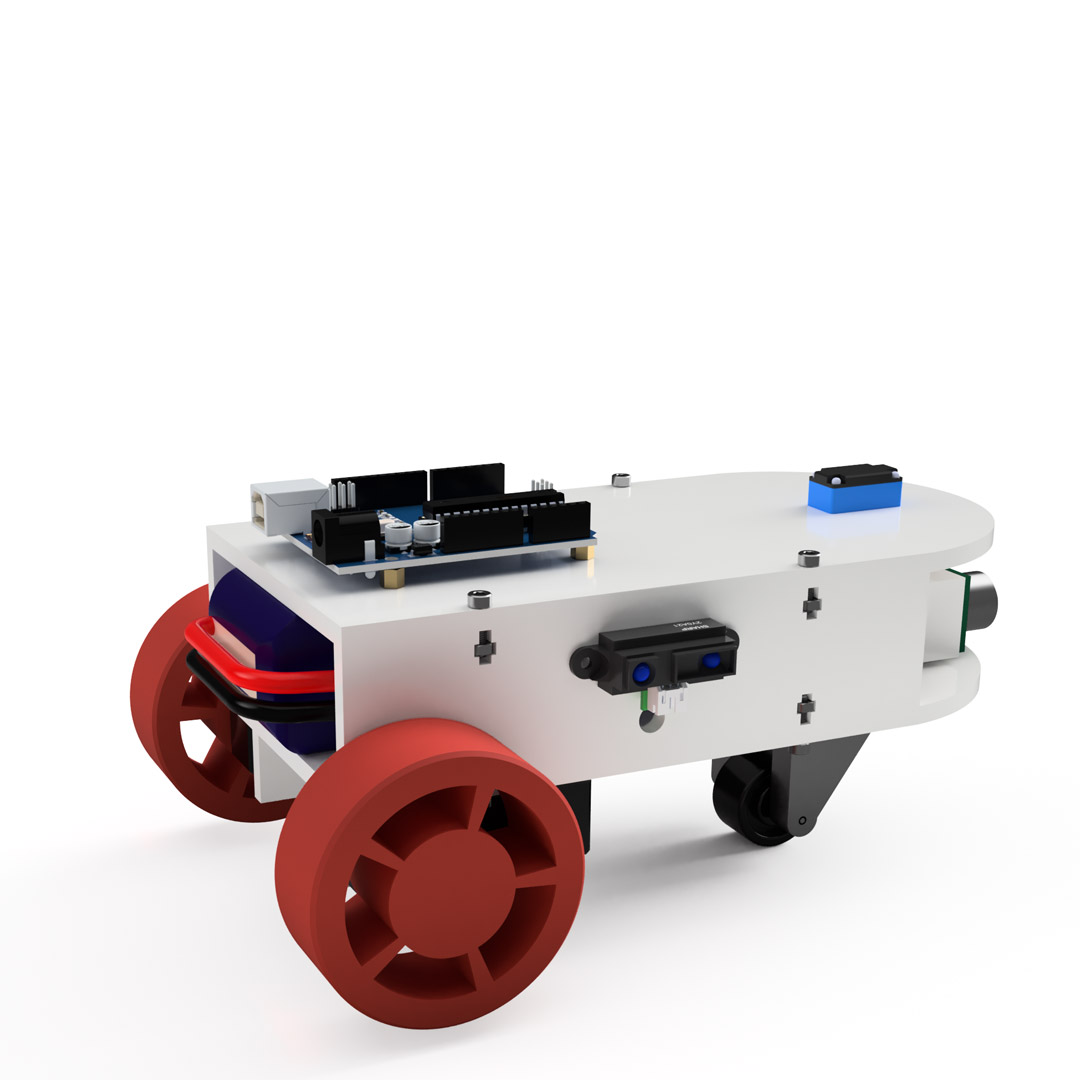
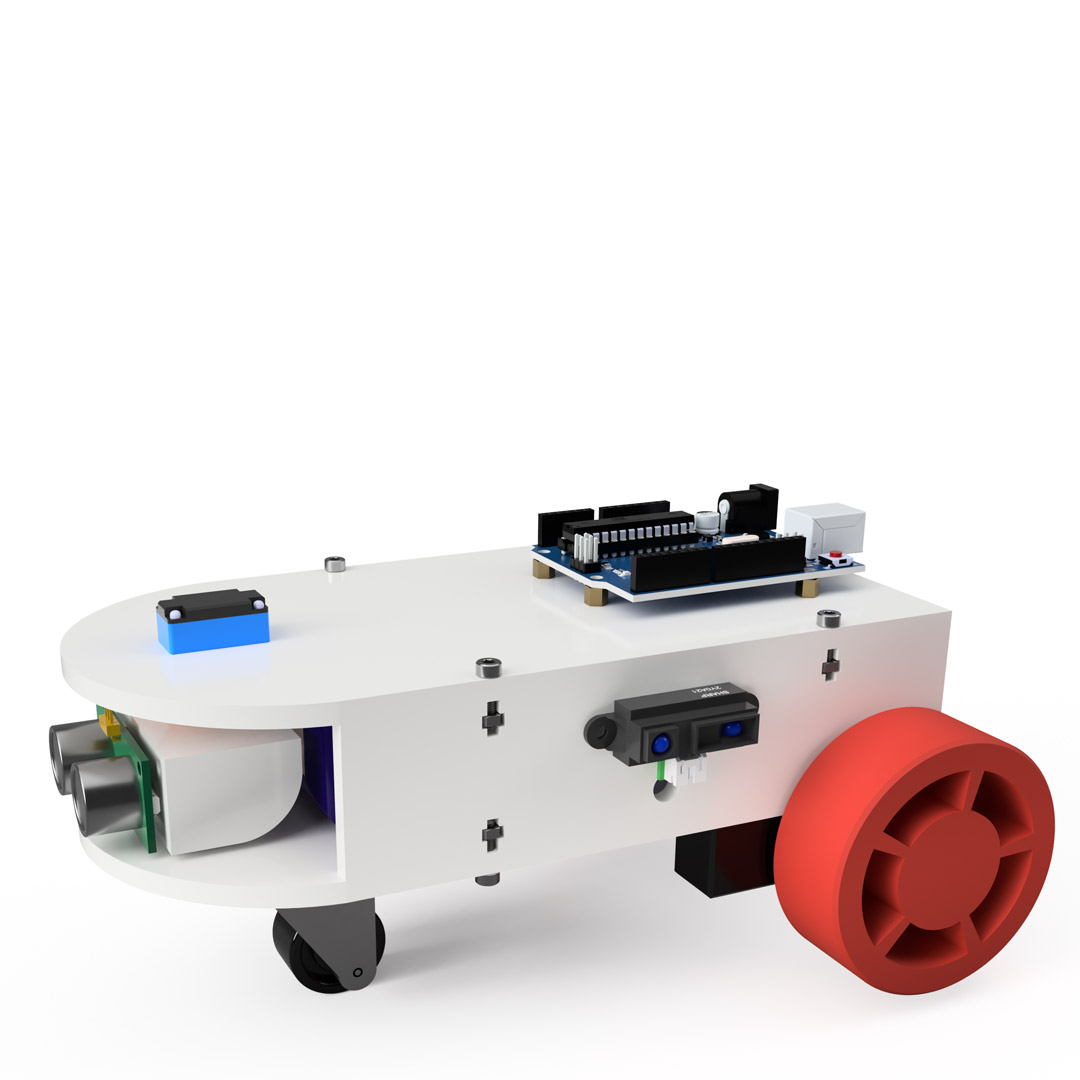
Displayed in Figures 1 to 3 are computer rendered images of the 3D design for Dexter v1, a project developed in Autodesk Fusion 360 which is also online available here (view in browser or download). You can observe how I separated the body of the robot into planar surfaces easily manufacturable by laser cutting. For the joints at the margins, I used M3 screws with a notch cut in the perpendicular plane to secure their nuts. For the fixing of electronics components, such as motors or Arduino board I designed smaller holes in plastic which I filleted with an M3 tap thread after the laser cutting process.
Final Product
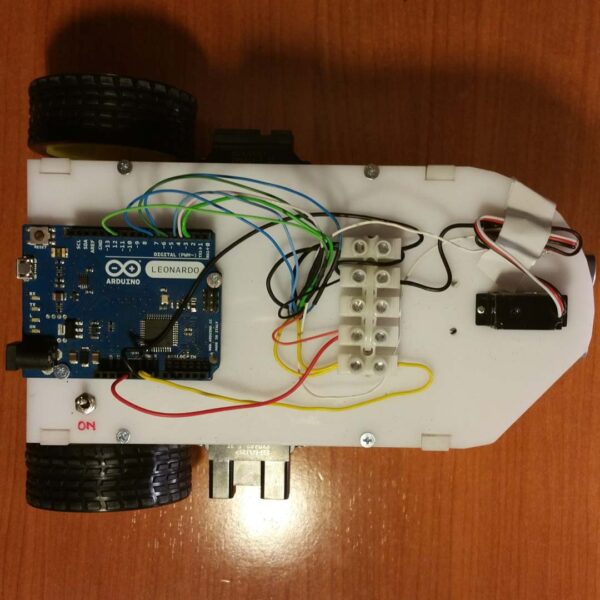
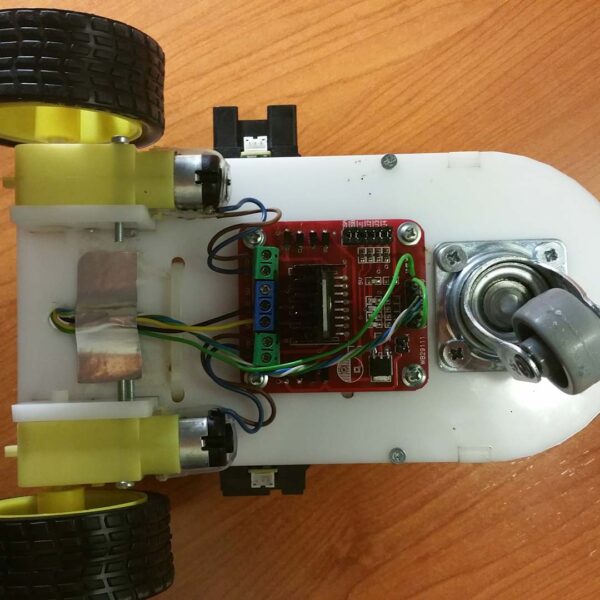
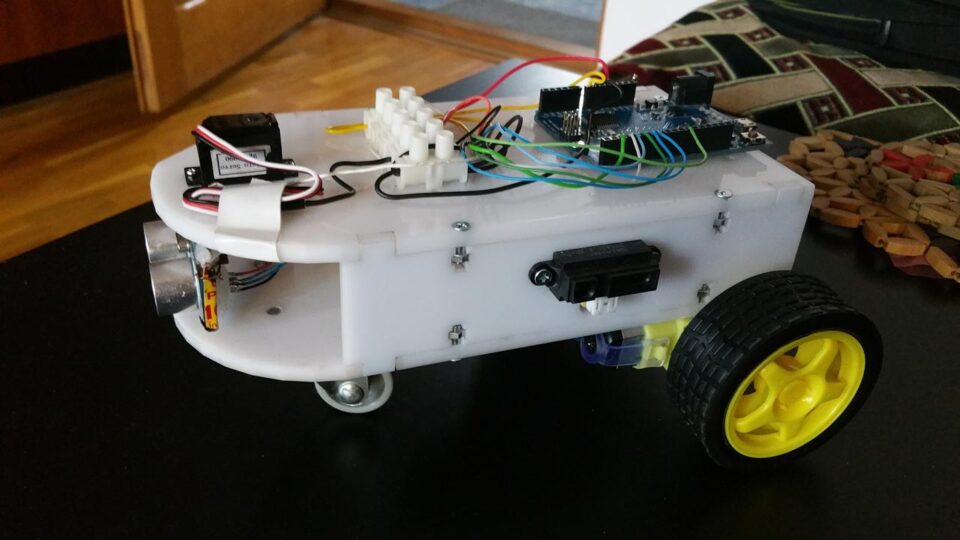
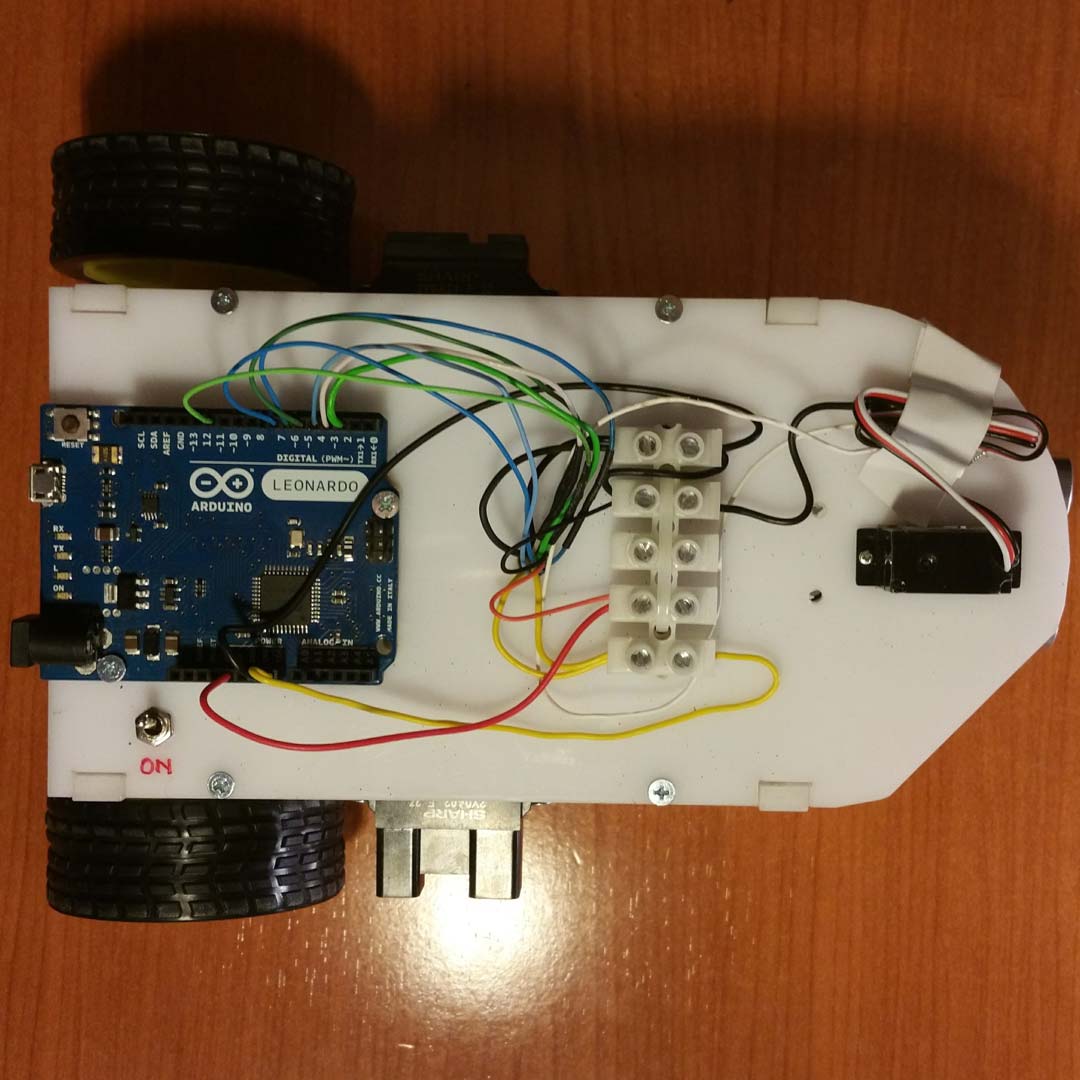
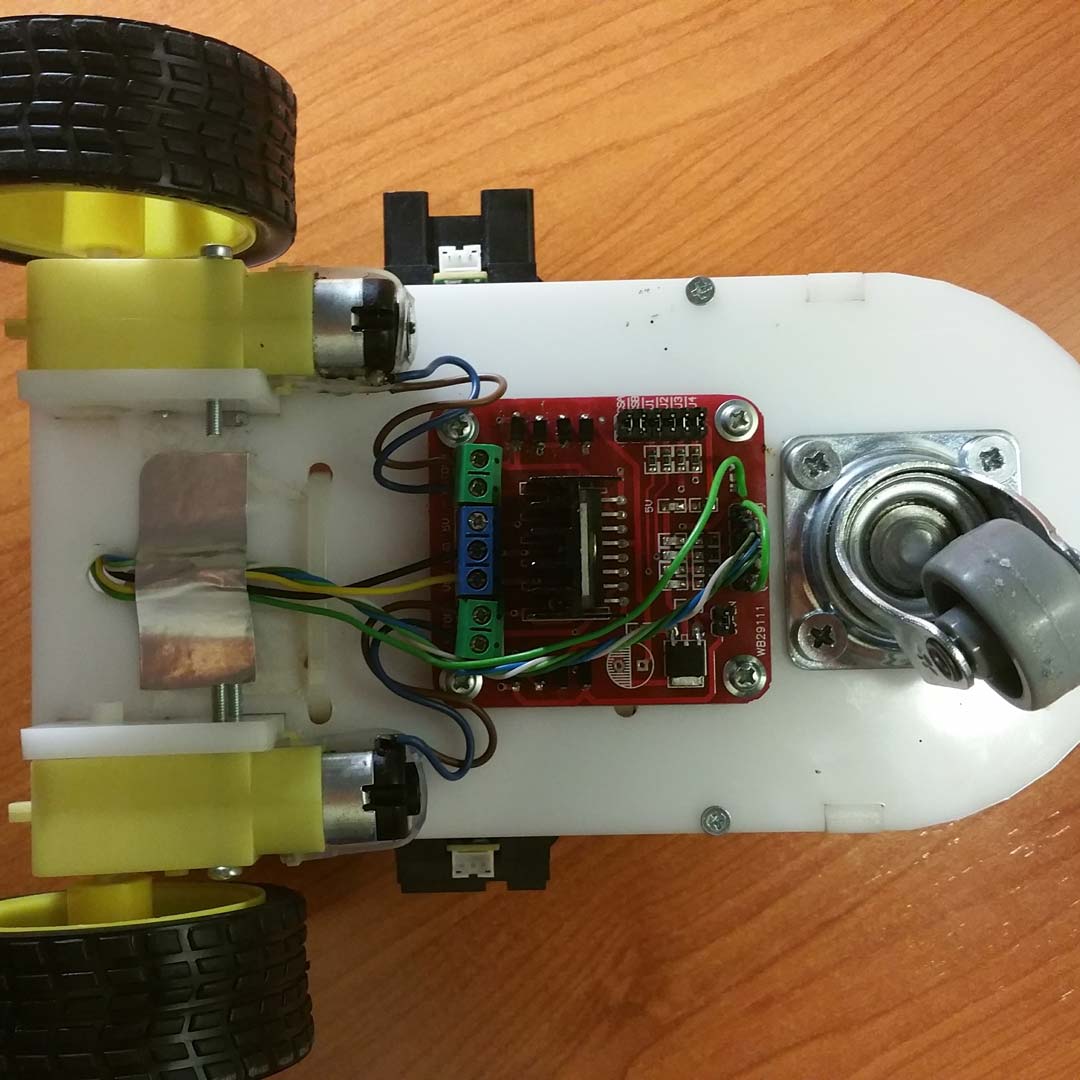
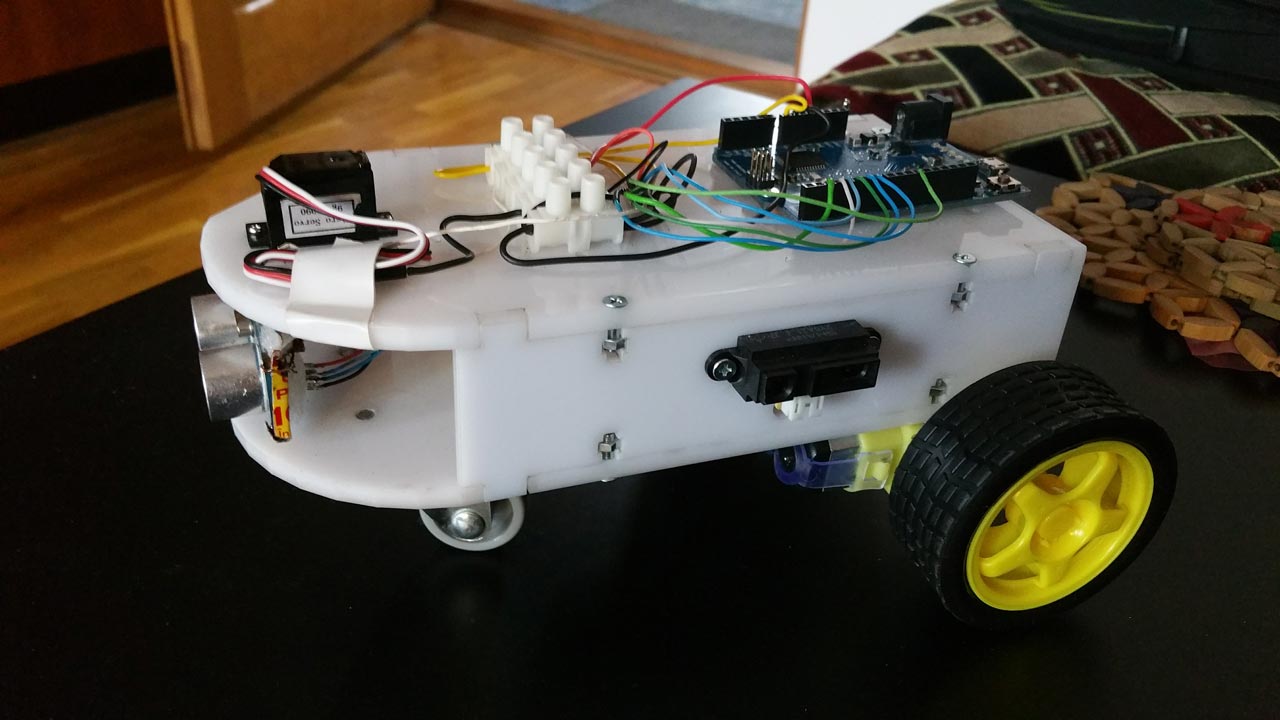
You can view in Figure 4 the TOP side of the robot where the Arduino board, some terminal strips, and the servomotor moving the ultrasonic sensor are placed. In Figure 5, on the BOTTOM side of the robot are visible the motor’s driver, the two motors, and a dummy wheel. Finally, in Figure 6 you can also notice the ultrasonic sensor placed at the front of the robot and an infrared one placed on the left side (accompanied by one more on the right side not visible in this figure).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}